2、美国在1940年颁发第一张电动轮椅的专利证书。
3、初期的产品不太受到重视的原因:严重残障者的愈合状况不佳,早期产品笨重、缺乏效率、可靠性低等因素。
4、二次大战后,大量生还的残障者激增,市场需求也突然加大。
5、60—70年代,控制器的稳定度渐渐改良,一些特殊控制的界面也陆续开发成功。
6、80年代,由于微处理器与应用在控制器的制造上,使得操控性及稳定性大幅提升。
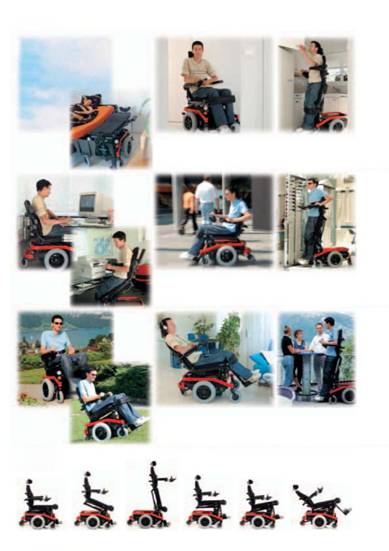
7、90年代,电动轮椅的发展主要是在结构设计的改良,包括:
1)专为电动轮椅设计的各式骨架
2)座椅系统与传动底座分离的设计
3)不同位置的传动轮设计


1、座椅系统与传动底座可轻易抽换。
2、同样的动力底座,可支援不同的座椅系统(不同功能或尺寸的座椅)。
1、室内型:轻巧、小轮、回转半径小。
2、室内外通用型:除了室内活动外,可在学校、公司、人行道或商场等场所活动,但必须在较为平坦坚硬的地面上活动。通常电瓶容量不大,行动距离有限。
3、户外活动型:可以在不平稳的颠簸路面行进,连续行驶距离较长且速度较快。
(一)、平面固定型:
座面与靠背为平面设计,且座靠背之夹角是固定的,无法改变。

(二)、可平躺型:
1、特点:靠背与座面间的角度可改变(向后躺下或起来)。
2、适用:减压、血压护理工作、伸懒腰。

(三)可后倾型
1、特点:整个座椅系统与水平面的相对角度可变化。
2、优点:对抗张力反射、减少压力、代偿身体控制能力不足。

重心前移的安全设计:可后倾前轮驱动式电动轮椅

可后倾中轮驱动式电动轮椅
(四)可站立型


1、特点:轮椅骨架可将老年人、残疾人由坐姿撑起成为站力姿势。
2、优点:心理效益、骨骼强化、压力减除。
一般有下列几种常见的组合:
(1)手动推进及站立
(2)手动推进电动站立
(3)电动推进与站立
3、缺点:不同轴转动所造成的滑动影响摆位。
4、解决策略:零剪力的靠背系统
(五)高度可变型
特点:轮椅座椅角度不变下,可让老年人、残疾人升降到达不同的高度。

(六)适合居家与办公的电动轮椅
1、中轮驱动型轮椅,所以拥有最小的回转半径
2、座面高度可以方便探取高处物品
3、适合儿童使用的电动轮椅,考虑儿童到地面玩耍以及与成人谈话时所需的不同高度。


(七)儿童专用电动轮椅

儿童轮椅
1、尺寸符合儿童的身材
2、可加装摆位的配件
3、座椅高度与角度可电动调整
4、控制器整合性良好
(八)多动向升降式电动轮椅
1、世界首创可正逆向驾驶模式,在狭小的通道中可以正面驶入,逆向驶出;无须倒车。
2、可电动升高、旋转方便探取高处物品
(九)将手动式轮椅升级为电动轮椅
1、优点:
(1)提高手动轮椅的活动范围
(2)可保留手动轮椅的轻便、可收折性
(3)节省老年人、残疾人或照护者的能量消耗
2、外加动力系统的设计:
3、可拆卸式的电池组:
4、轮中内建马达的设计:
5、动力辅助式手动轮椅:
(1)将动力装置与手动轮椅相结合
(2)类似动力方向盘的功能,只要推手扶圈即可
6、有动力辅助

(十)外加牵引机的设计:
1、即卸式的连结设计,于室内使用时不增加体积
2、有外出需求时可作较长距离的活动或轻松爬坡

(十一)其它类型的电动轮椅
1、可横行的电动轮椅:除了一般的行驶方式外,尚可水平横移。
2、全姿势可调电动轮椅

(一)一部电动轮椅应可从四周方面来检视:
1、座椅及骨架机构系统
2、底座传动系统
3、电动控制系统
4、人机控制界面
(二)座椅及骨架机构系统
原则:类似一般手动式轮椅,考虑尺寸、角度、各式摆位配件以及骨架机构(标准、可倾躺、可变换高度)的形式。
(三)底座传动系统
包括:传动轮的位置、驱动马达的功率、传动的方式(齿轮、皮带)
(四)不同驱动轮位置对操控影响
1、原地回转的半径不同
2、行进时的循迹不同
(五)电动控制系统
包括:类比或数位式的控制器、各项操控参数的调整、能否额外控制其它辅具设备(如环控系统或沟通辅具等)。
(六)人机控制界面
老年人、残疾人如何来指挥电动系统的方式:尽可能利用个人最可信、有效率的身体部位来控制。
1、各式摇杆
2、脚控电动轮椅
3、拇指微动控制器
4、吹吸界面
5、吹吸控制:
(1)属于非比例式控制。
(2)即由空气动力开关侦测轻吸气、重吸气、轻吹气以及重吹气四种控制指令。
(3)适合严重瘫痪如高位颈髓的老年人、残疾人使用。
6、头部控制(按键式及倾斜式)
7、下巴控制:有些需配合口含棒操作按键


1、轮椅自动导航系统
1)置于踏板前端或头顶上之雷射判距离。
2)预先将建物的结构图载入电脑。
3)使用时先标示现在位置,启动后自动寻找路径,并自动闪避障碍物。
2、电动轮椅防撞系统
1)利用类似倒车雷达的超音波侦测器侦测障碍物。
2)遇到障碍物时自动将马达动力切断或逆转,以防止撞击事件的发生。
3、轮椅附加机械手臂
1)对于上肢运动功能不佳的电动轮椅使用的老年人、残疾人,伸手取物或进食是十分困难的是。
2)利用按键或特殊开关驱动机械手臂代为执行手功能。

1、履带爬楼轮椅
履带爬楼轮椅适用于室内外的上下楼梯和较为复杂的路面,履带式爬楼轮椅是将电动轮椅与履带爬楼机合为一体的产物,老年人、残疾人可独立操作完成爬楼的动作。
在平地行驶时使用轮胎,到了有楼梯的地方时,它就会像“变形金刚”一样,收起轮胎并放下履带,变成一台标准的履带式爬楼机。这款爬楼机既方便了老年人、残疾人的短途出行,又可以爬楼,非常实用,但价格昂贵。
履带爬楼轮椅重量一般50Kg左右;24V充电电池;上行提升速度5/ m分钟左右;下行或空载速度:5 m/分钟左右;梯度坡度35°为最大值;额定载重:130kg左右;楼梯最小宽度:850 mm。

履带爬楼轮椅

履带爬楼轮椅

履带爬楼轮椅

履带爬楼轮椅

履带爬楼轮椅
2、智能爬楼轮椅
智能爬楼轮椅,集现代科技研究与现代工业制造业为一体,具有强大动力源,爬楼如履平地一般,智能控制,制作精细,但是由于25000美元的售价让绝大部分人买不起。

智能爬楼轮椅

智能爬楼轮椅

智能爬楼轮椅

智能爬楼轮椅

智能爬楼轮椅
依照结构不同可分为:三轮与四轮代步车
(一)三轮代步车的特点
1、体积小,易穿梭
2、重量较轻,易搬运
3、底面积较小重心不易维持,转弯时常会造成翻覆的危险
4、座椅转向设计的机构与应用
5、座椅前后移动的设计
6、配合方向将手柄角度的调整,以满足不同身材个案的操控需求。
7、方便转位的考虑。






(二)马达、齿轮箱与控制器
1、电动代步车不同于电动轮椅,只用一个马达同时驱动两侧轮子。
2、控制器依据人机界面传来的指令,调节不同的电压,以改变直流马达的转
速。
(三)不同于电动轮椅的转向机制
1、电动轮椅以摇杆指挥控制器,以驱动并分别调节两个马达的转速;转弯时利用左右两轮的差速以转向。
2、电动代步车直接一将柄(龙头)带动连动杆系统以直接转动轮子的角度,达到转向的目的。
(四)马达与驱动轮
驱动轮愈大,克服障碍能力愈加,但是对马达的马力要求相对增大。
(五)无线电波对电控制系统的威胁
1、控制器是精密的电子零件组成的电路调节系统,易受外界强烈无线电波的干扰。
2、控制器贩售前需经过电磁兼容的检测,以测试其对抗电磁干扰的防护能力。

